Multi‑Sensor RobotDog Platform
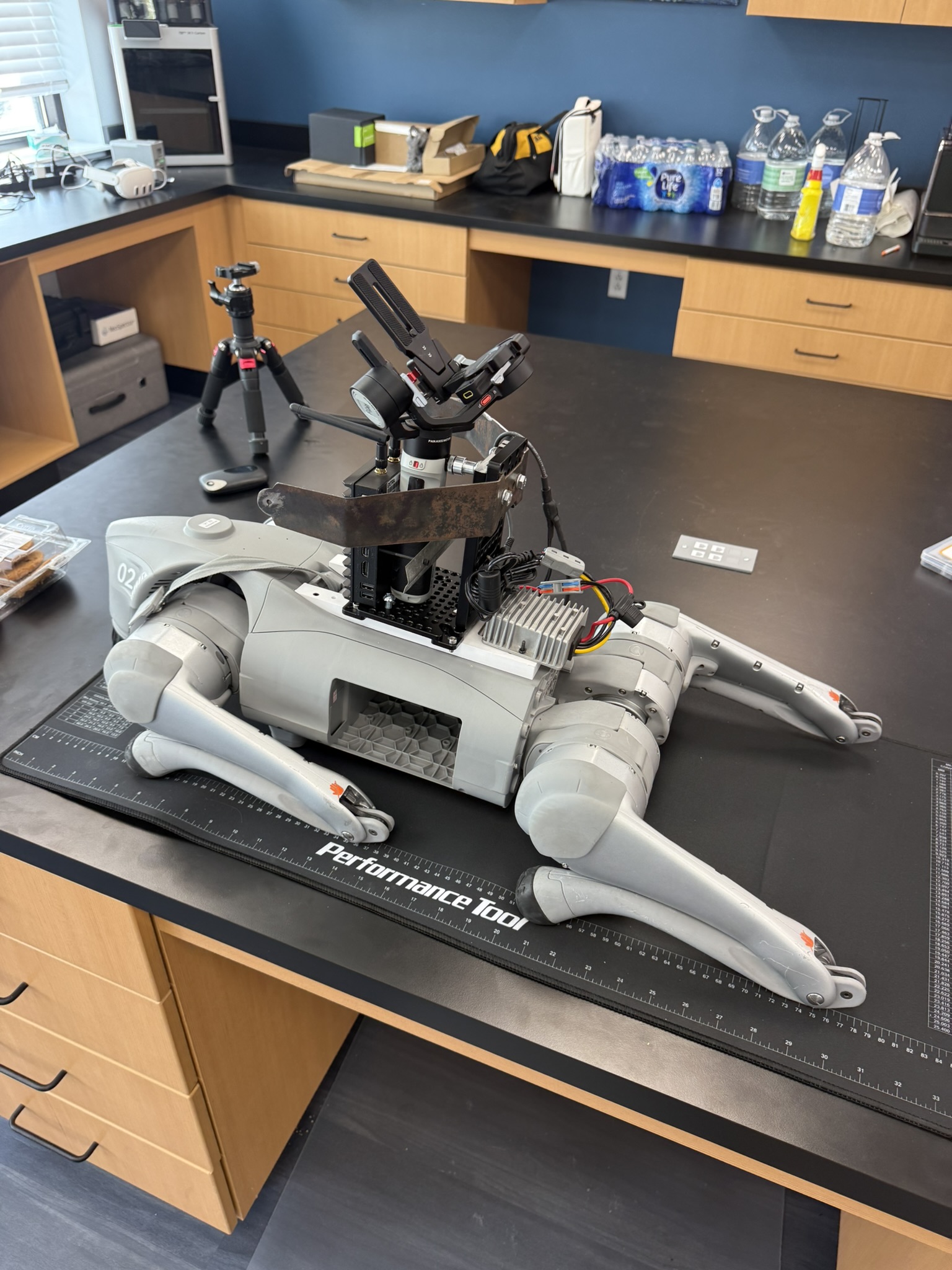
A Unitree quadruped equipped with hyperspectral/RGB sensors, LiDAR, and Jetson edge compute for real-time mapping.



Multi‑Sensor RobotDog Platform
Edge Sensing Systems
A mobile sensing platform based on a Unitree quadruped, integrating hyperspectral and RGB cameras with LiDAR and NVIDIA Jetson compute for autonomous scouting and mapping.
A mobile sensing platform based on a Unitree quadruped, integrating hyperspectral and RGB cameras with LiDAR and NVIDIA Jetson compute for autonomous scouting and mapping.
Sensor synchronization, onboard data logging, and edge inference pipelines designed to support near real-time analytics (e.g., tree counting, canopy characterization, and soil variability mapping).
Orchard inventory and monitoring, rapid field scouting, and multimodal datasets for training and validating AI models in complex outdoor environments.
Key Features
- Multisensor data capture (RGB + hyperspectral + LiDAR)
- Edge compute for near real-time inference
- Built for outdoor autonomy and rapid scouting
- Supports mapping workflows for trees and soils